
近日,上海交通大学医疗机器人研究院院长杨广中教授在Science Advances杂志上发表研究论文“Liquid seal for compact micropiston actuation at the capillary tip”(DOI: 10.1126/sciadv.aba5660)。
近年来,随着对靶向治疗以及介入治疗需求的不断增长,人们对于开发可用于体内和体外的新型微型工具的兴趣不断增加。亚毫米级导管末端的驱动器可进行组织活检和操作,或通过有源微光学,来完善细胞尺度的体内介入治疗,但这种尺度上的摩擦力在传统装置上会产生问题,因此亟需针对需求进行改进与提高。
为了提供数百微米规模的驱动力,该论文提出了气动驱动力和表面张力的组合来驱动活塞,该微型活塞连接到直径为140 μm的毛细血管末端,采用滴油法将活塞和气缸密封隔开,以防止185 mbar压强差以下的任何泄漏,同时在运转部件之间润滑摩擦,活塞产生的力在压力高达130 μN时线性增加,且不会破坏液封。此微型活塞最大直径为150 μm,通过双光子打印制备而成,实验证明这种微型活塞结合微型夹具(如图1所示),可抓握、移动并释放50 μm微球(如图2所示)。此项研究为微米级导管驱动开辟了崭新的道路。
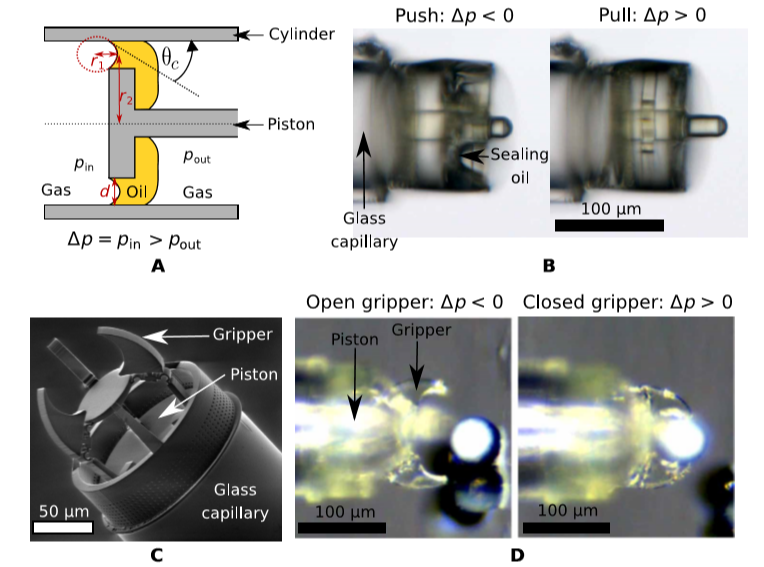
图1 微型活塞的工作原理以及微型活塞与微型夹具集成的显微镜图与扫描电子显微镜图
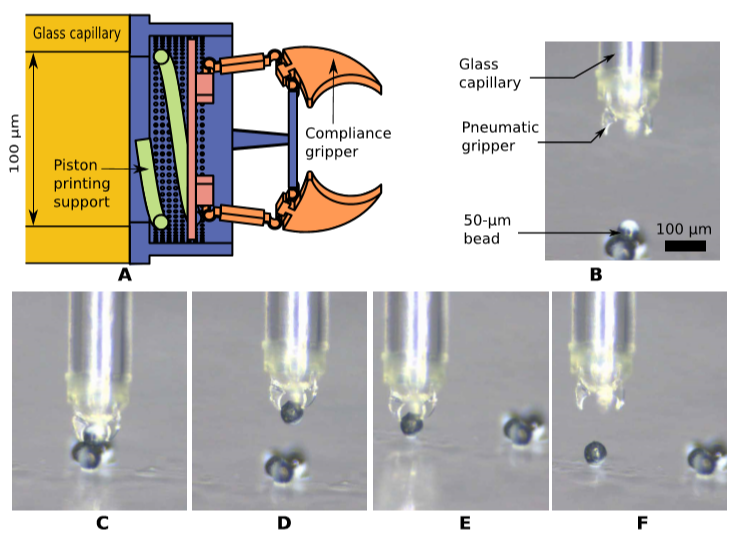
图2 基于微型活塞的微型夹具实现对50 μm微球的抓握、移动与释放
论文链接:https://advances.sciencemag.org/content/6/22/eaba5660
文字 | 邬崇朝,顾运,张悦
审核 | 陈卫东
责编 | 陈卫东
