
10月25日-10月29日,“2020年IEEE国际智能机器人与系统大会 ”(IROS 2020)在线举行,研究院杨广中教授、陈卫东教授、王贺升教授等团队的研究成果将在大会中发表。
以下为相关论文信息:
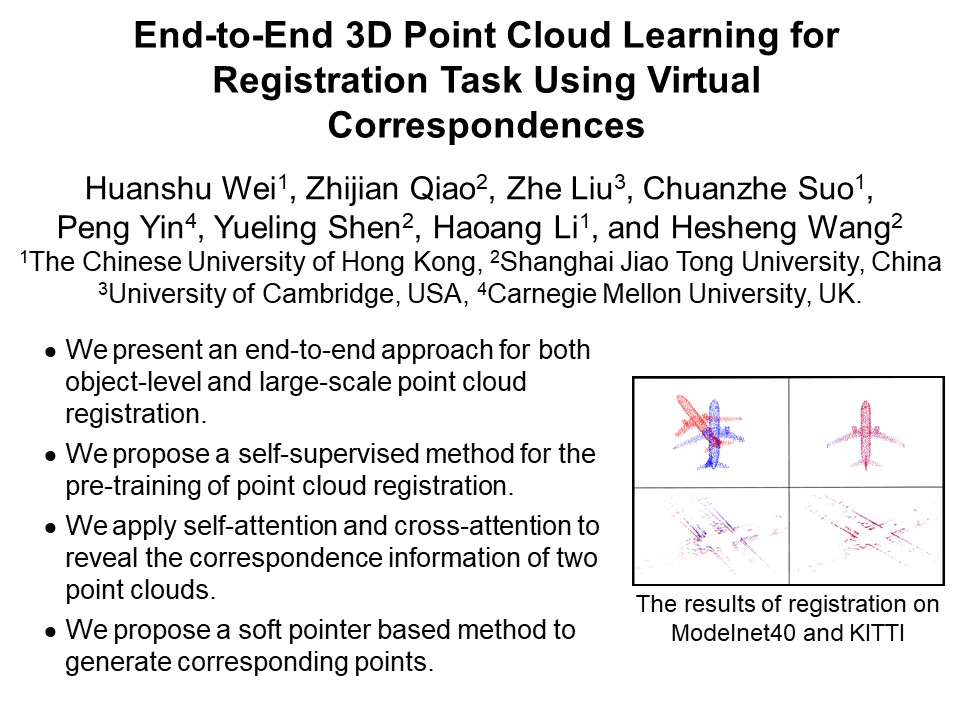
Huanshu Wei, Zhijian Qiao, Zhe Liu, Chuanzhe Suo, Peng Yin, Yueling Shen, Haoang Li, Hesheng Wang. “End-to-End 3D Point Cloud Learning for Registration Task Using Virtual Correspondences.” International Conference on Intelligent Robots and Systems (IROS), 2020.
3D Point cloud registration is still a very challenging topic due to the difficulty in finding the rigid transformation between two point clouds with partial correspondences, and it’s even harder in the absence of any initial estimation information. In this paper, we present an end-to-end deep-learning based approach to resolve the point cloud registration problem. Firstly, the revised LPD-Net is introduced to extract features and aggregate them with the graph network. Secondly, the self-attention mechanism is utilized to enhance the structure information in the point cloud and the cross-attention mechanism is designed to enhance the corresponding information between the two input point clouds. Based on which, the virtual corresponding points can be generated by a soft pointer based method, and finally, the point cloud registration problem can be solved by implementing the SVD method. Comparison results in ModelNet40 dataset validate that the proposed approach reaches the state-of-the-art in point cloud registration tasks and experiment resutls in KITTI dataset validate the effectiveness of the proposed approach in real applications.
原文链接:https://ras.papercept.net/proceedings/IROS20/1105.pdf
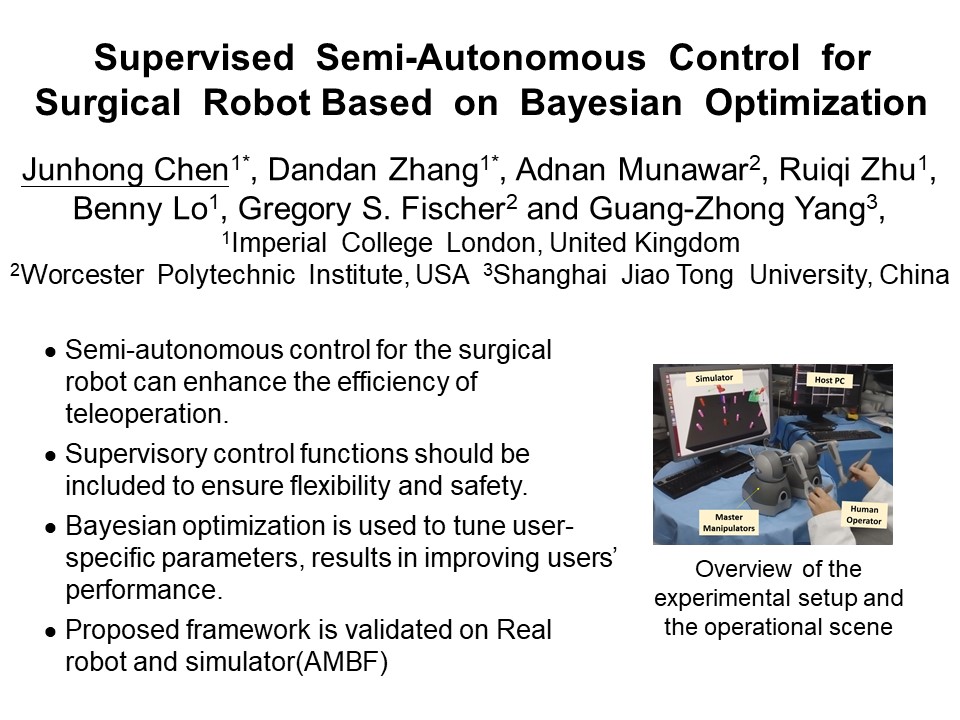
Junhong Chen, Dandan Zhang, Adnan Munawar, Ruiqi Zhu, Benny Lo, Gregory S. Fischer, Guang-Zhong Yang. “Supervised Semi-Autonomous Control for Surgical Robot Based on Bayesian Optimization.” International Conference on Intelligent Robots and Systems (IROS), 2020.
The recent development of Robot-Assisted Minimally Invasive Surgery (RAMIS) has brought much benefit to ease the performance of complex Minimally Invasive Surgery (MIS) tasks and lead to more clinical outcomes. Compared to direct master-slave manipulation, semi-autonomous control for the surgical robot can enhance the efficiency of the operation, particularly for repetitive tasks. However, operating in a highly dynamic in-vivo environment is complex. Supervisory control functions should be included to ensure flexibility and safety during the autonomous control phase. This paper presents a haptic rendering interface to enable supervised semi-autonomous control for a surgical robot. Bayesian optimization is used to tune user-specific parameters during the surgical training process. User studies were conducted on a customized simulator for validation. Detailed comparisons are made between with and without the supervised semi-autonomous control mode in terms of the number of clutching events, task completion time, master robot end-effector trajectory and average control speed of the slave robot. The effectiveness of the Bayesian optimization is also evaluated, demonstrating that the optimized parameters can significantly improve users’ performance. Results indicate that the proposed control method can reduce the operator’s workload and enhance operation efficiency.
原文链接:https://ras.papercept.net/proceedings/IROS20/2838.pdf
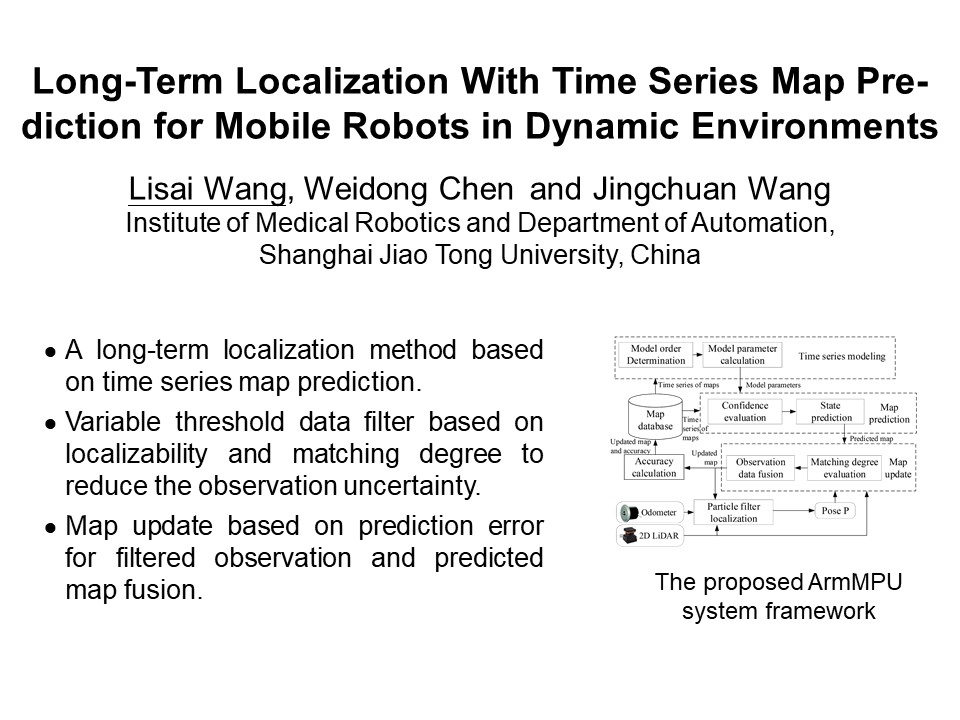
Lisai Wang, Weidong Chen, and Jingchuan Wang. “Long-Term Localization With Time Series Map Prediction for Mobile Robots in Dynamic Environments.” International Conference on Intelligent Robots and Systems (IROS), 2020.
In many applications of mobile robot, the environment is constantly changing. How to use historical information to analysis environmental changes and generate a map corresponding with current environment is important to achieve high-precision localization. Inspired by predictive mechanism of brain, this paper presents a long-term localization approach named ArmMPU (ARMA-based Map Prediction and Update) based on time series modeling and prediction. Autoregressive moving average model (ARMA), a kind of time series modeling method, is employed for environmental map modeling and prediction, then predicted map and filtered observation are fused to fix the prediction error. The simulation and experiment results show that the proposed method improves long-term localization performance in dynamic environments.
原文链接:https://ras.papercept.net/proceedings/IROS20/2848.pdf
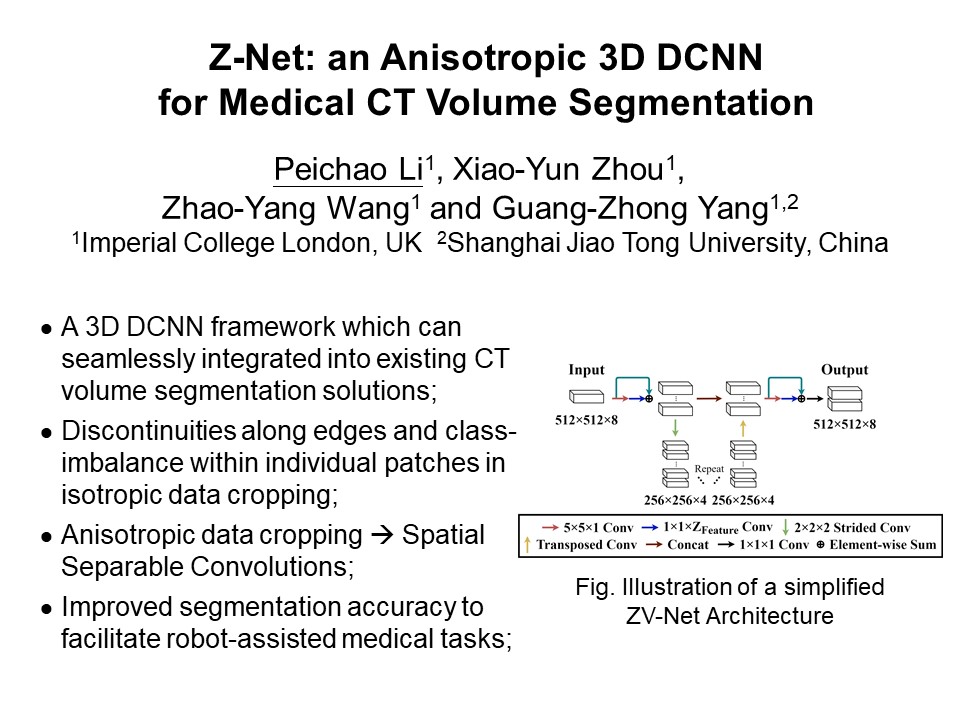
Peichao Li, Xiao-Yun Zhou, Zhao-Yang Wang, Guang-Zhong Yang. “Z-Net: an Anisotropic 3D DCNN for Medical CT Volume Segmentation.” International Conference on Intelligent Robots and Systems (IROS), 2020.
Accurate volume segmentation from the Computed Tomography (CT) scan is a common prerequisite for preoperative planning, intra-operative guidance and quantitative assessment of therapeutic outcomes in robot-assisted Minimally Invasive Surgery (MIS). 3D Deep Convolutional Neural Network (DCNN) is a viable solution for this task, but is memory intensive. Small isotropic patches are cropped from the original and large CT volume to mitigate this issue in practice, but it may cause discontinuities between the adjacent patches and severe class-imbalances within individual subvolumes. This paper presents a new 3D DCNN framework, namely Z-Net, to tackle the discontinuity and class-imbalance issue by preserving a full field-of-view of the objects in the XY planes using anisotropic spatial separable convolutions. The proposed Z-Net can be seamlessly integrated into existing 3D DCNNs with isotropic convolutions such as 3D U-Net and V-Net, with improved volume segmentation Intersection over Union (IoU) - up to 12.6%. Detailed validation of Z-Net is provided for CT aortic, liver and lung segmentation, demonstrating the effectiveness and practical value of Z-Net for intra-operative 3D navigation in robot-assisted MIS.
原文链接:https://ras.papercept.net/proceedings/IROS20/1172.pdf
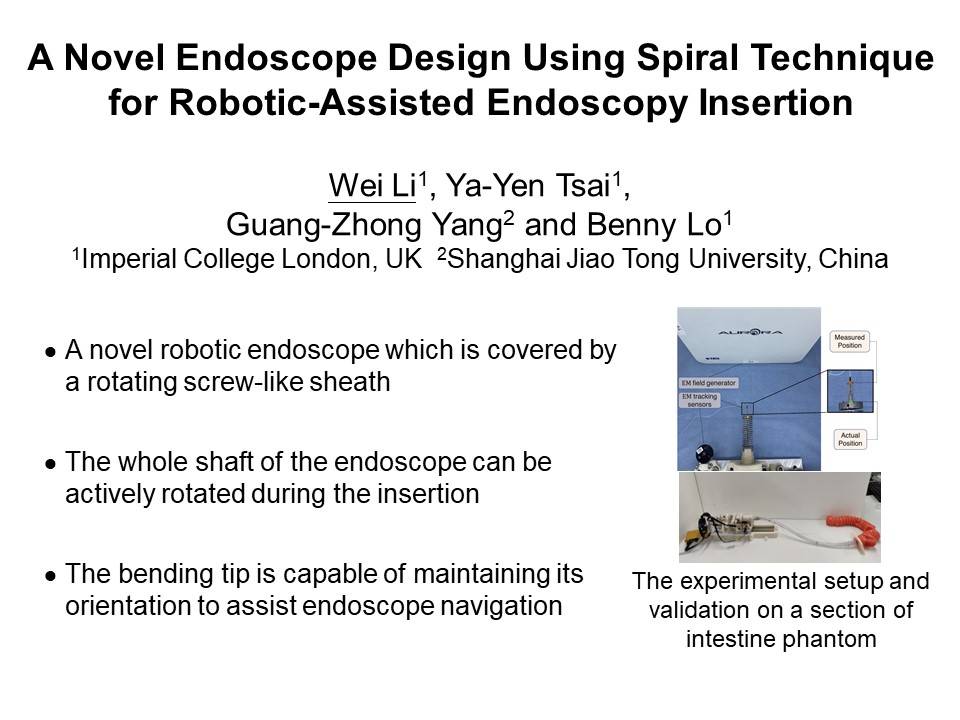
Wei Li, Ya-Yen Tsai, Guang-Zhong Yang, Benny Lo. “A Novel Endoscope Design Using Spiral Technique for Robotic-Assisted Endoscopy Insertion.” International Conference on Intelligent Robots and Systems (IROS), 2020.
Gastrointestinal (GI) endoscopy is a conventional and prevalent procedure used to diagnose and treat diseases in the digestive tract. This procedure requires inserting an endoscope equipped with a camera and instruments inside a patient to the target of interest. To manoeuvre the endoscope, an endoscopist would rotate the knob at the handle to change the direction of the distal tip and apply the feeding force to advance the endoscope. However, due to the nature of the design, this often causes a looping problem during insertion making it difficult to be further advanced to the deeper section of the tract such as the transverse and ascending colon. To this end, in this paper, we propose a novel robotic endoscope which is covered by a rotating screw-like sheath and uses a spiral insertion technique to generate ’pull’ forces at the distal tip of the endoscope to facilitate insertion. The whole shaft of the endoscope can be actively rotated, providing the crawling ability from the attached spiral sheath. With the redundant control on a spring-like continuum joint, the bending tip is capable of maintaining its orientation to assist endoscope navigation. To test its functions and feasibility to address the looping problem, three experiments were carried out. The first two experiments were to analyse the kinematic of the device and test the ability of the device to hold its distal tip at different orientation angles during spiral insertion. In the third experiment, we inserted the device in the bent colon phantom to evaluate the effectiveness of the proposed design against looping when advancing through a curved section of a colon. Results show the moving ability using spiral technique and verify its potential of clinical application.
原文链接:https://ras.papercept.net/proceedings/IROS20/2137.pdf
文字 | 张悦
审核 | 陈卫东
排版 | 张悦
责编 | 陈卫东
