
Microtentacle Actuators Based on Shape Memory Alloy Smart Soft Composite
Hyun-Taek Lee, Florent Seichepine, Guang-Zhong Yang
Recent advances in miniature robotics have brought promising improvements in performance by leveraging the latest developments in soft materials, new fabrication schemes, and continuum actuation. Such devices can be used for applications that need delicate manipulation such as microsurgery or investigation of small-scale biological samples. The shape memory effect of certain alloys is one of the promising actuation mechanisms at small scales because of its high work density and simple actuation mechanism. However, for sub-millimeter devices, it is difficult to achieve complex and large displacement with shape memory alloy actuators because of the limitation in the fabrication process. Herein, a fabrication scheme for miniaturized smart soft composite actuator is proposed by utilizing two-photon polymerization. The morphing modes are varied by changing the direction of the scaffold lamination. In addition, the actuation is controlled via local resistive heating of a carbon nanotube layer deposited inside of the actuators. The proposed design can generate a 390 µN force and achieve a bending angle up to 80°. Applications of the actuators are demonstrated by grasping small and delicate objects with single and two finger devices.
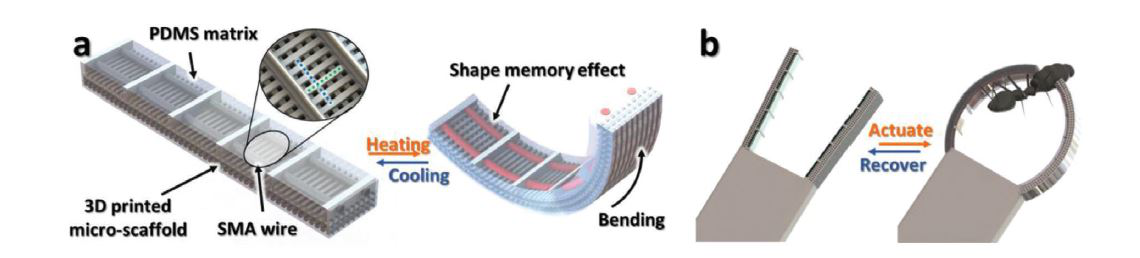
a) Design and actuation mechanism of the miniature soft actuator. Due to the shape memory effect of SMA wires embedded in the actuator, the entire structure shows bending motion according to the temperature conditions. Green and blue dashed lines in the inset figure indicate the direction of the scaffolds printed by 2PP process. b) Concept image of miniature soft gripper suited to micromanipulation task, consisting of two tentacle actuators.
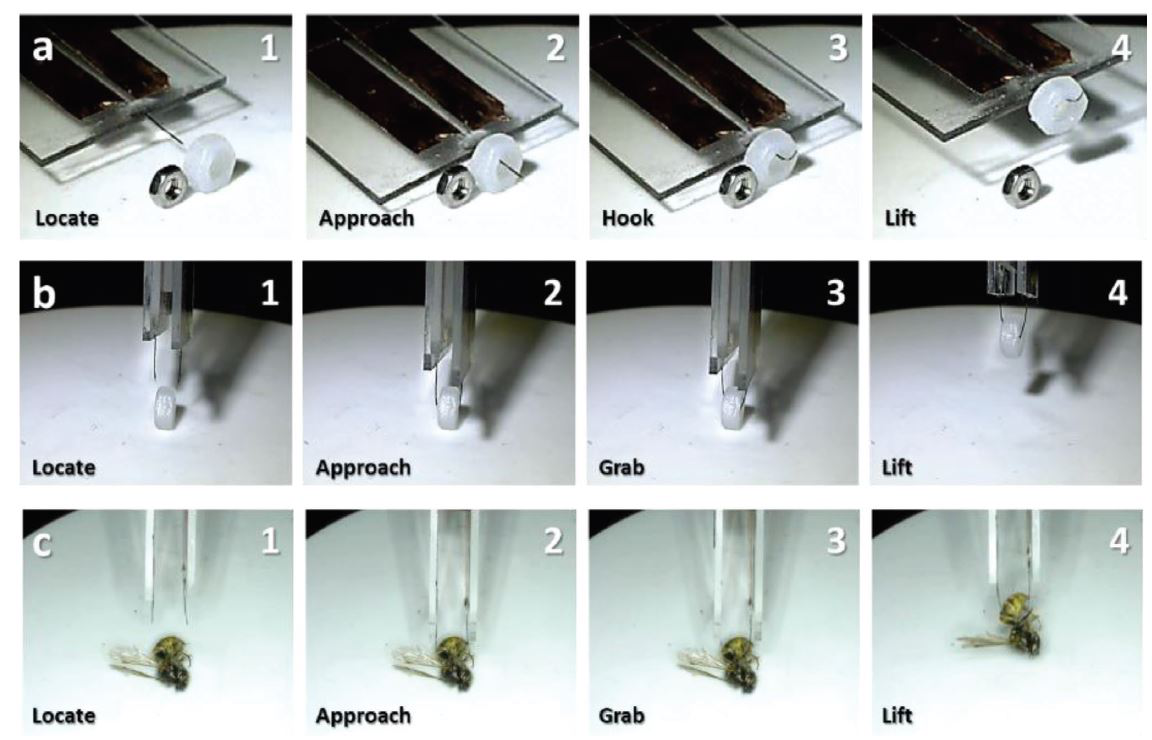
Demonstration of object manipulation with tentacle actuators. The experiment setup to simulate the situation of the manipulating object in a hard-to-reach position with conventional actuators. a) Lifting weight with a single tentacle. b) The gripping motion of double-side tentacle actuators (Weight of the object is 80 mg.) and c) grabbing a wasp. The gripper can handle delicate objects without damages.



