
Liquid seal for compact micropiston actuation at the capillary tip
Antoine Barbot, Maura Power, Florent Seichepine, Guang-Zhong Yang
Actuators at the tip of a submillimetric catheter could facilitate in vivo interventional procedures at cellular scales by enabling tissue biopsy and manipulation or supporting active micro-optics. However, the dominance of frictional forces at this scale makes classical mechanism problematic. Here, we report the design of a microscale piston, with a maximum dimension of 150 μm, fabricated with two-photon lithography onto the tip of 140-μm-diameter capillaries. An oil drop method is used to create a seal between the piston and the cylinder that prevents any leakage below 185-mbar pressure difference while providing lubricated friction between moving parts. This piston generates forces that increase linearly with pressure up to 130 μN without breaking the liquid seal. The practical value of the design is demonstrated with its integration with a microgripper that can grasp, move, and release 50-μm microspheres. Such a mechanism opens the way to micrometer-size catheter actuation.
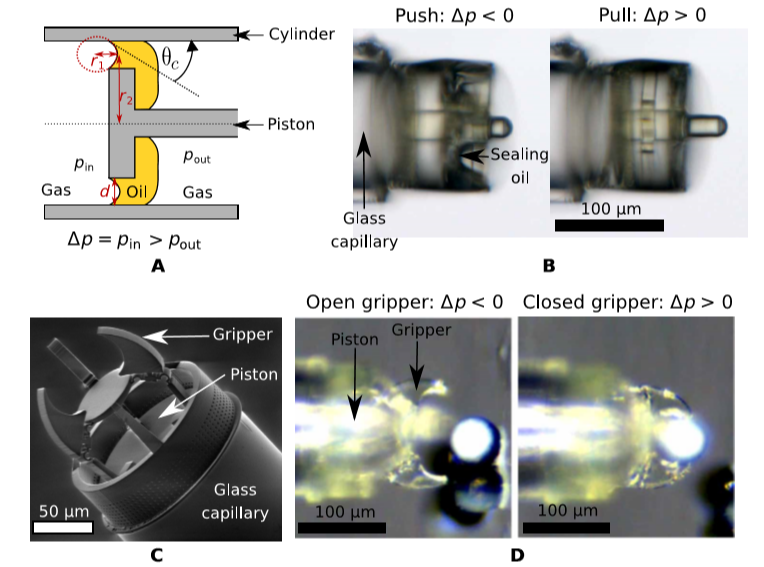
Principle of operation of the proposed micropiston. (A) Schematic of the microscale physical interaction at the seal formed by surface tension between gas and liquid. (B) Microscopic pictures of the micropiston actuation. The corresponding actuation video is available in movie S1. (C) The SEM picture of a micropiston integrated into a compliant gripper. (D) Demonstration of the gripper while grasping a microsphere.
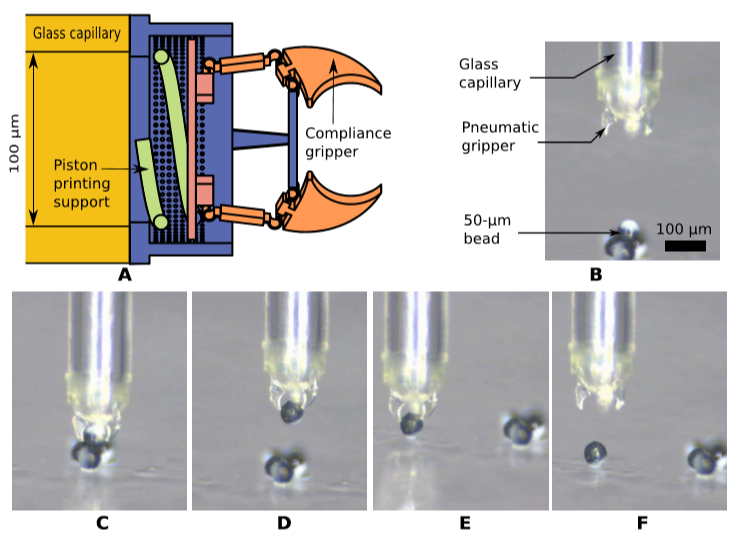
Micropiston-based compliant gripper. (A) The design of the compliant gripper on top of the micropiston. (B) A microscope view of 50-μm microsphere manipulation with the pneumatic gripper, demonstrating (C) grasp, (D and E) transport, and (F) release of the microsphere. A video record of the experiment is available in movie S3.



