2023
[30] Jinkai Li, Jianxin Yang, Yuxuan Liu, ZHEN LI, Guang-Zhong Yang,
Yao Guo*, "EasyGaze3D: Towards Effective and Flexible 3D Gaze Estimation from a Single RGB Camera ",
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023,
Accepted.
[Code] (*Corresponding author)
[29] Yuxuan Liu, Jianxin Yang, Xiao Gu, Yijun Chen,
Yao Guo*, and Guang-Zhong Yang*, "EgoFish3D: Egocentric 3D Pose Estimation from a Fisheye Camera via Self-Supervised Learning",
IEEE Transactions on Multimedia 2023,
Accepted.
[Paper][Code] (*Co-corresponding author)
[28] Frank Lo,
Yao Guo*, Yingnan Sun, Jianing Qiu, Benny Lo, "An Intelligent Nutritional Assessment System for Handheld Food Items via Weakly-Supervised Point Cloud Completion",
IEEE Transactions on Multimedia (TMM),
2023, vol. 25, pp. 5840 - 5851.
[Paper] (*Corresponding author)
Proposed weakly-supervised point cloud completion architecture.
[27] Yuxuan Liu, Jianxin Yang, Xiao Gu,
Yao Guo*, and Guang-Zhong Yang*, "EgoHMR: Egocentric Human Mesh Recovery via Hierarchical Latent Diffusion Model ",
IEEE International Conference on Robotics and Automation (ICRA), May,
2023, pp. 9807-9813.
[Paper][Code]. (*Co-corresponding author)
Illustration of our proposed method for human mesh recovery based on a single egocentric image via latent diffusion.
Overview of the proposed egoHMR network.
2022
[26] Xiao Gu,
Yao Guo, Zeju Li, Jianing Qiu, Qi Dou, Yuxuan Liu, Benny Lo*, and Guang-Zhong Yang*, "Tackling Long-Tailed Category Distribution Under Domain Shifts",
European Conference on Computer Vision (ECCV), July,
2022, pp. 727-743.
[Paper] [Code].
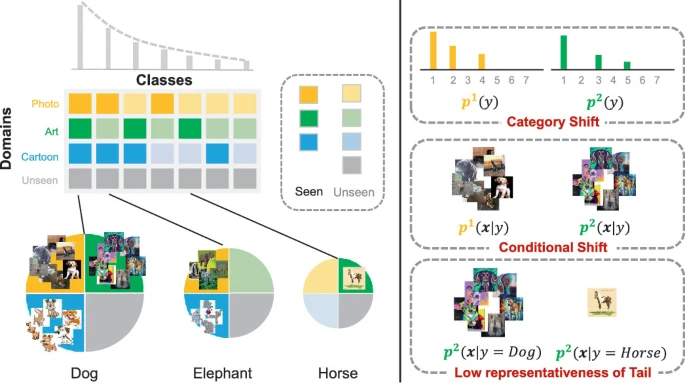
Visual illustrations of the issues complicated with long-tailed category distribution and conditional distribution shifts across domains.
[25] Yuxuan Liu, Jianxin Yang, Xiao Gu,
Yao Guo*, and Guang-Zhong Yang*, "Ego+X: An Egocentric Vision System for Global 3D Human Pose Estimation and Social Interaction Characterization",
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct.,
2022, pp. 5271-5277. (*Co-corresponding author)
[Paper] [Code]. (Co-corresponding author)
Illustration of the proposed egocentric vision system for social interaction characterization based on 3d canonical human pose estimation.
Overview of our proposed ego+x system.
[24] Jianxin Yang, Yuxuan Liu, Xiao Gu, Guang-Zhong Yang, and
Yao Guo*, "PoseSDF: Simultaneous 3D Human Shape Reconstruction and Gait Pose Estimation Using Signed Distance Functions",
IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA, pp. 1297-1303, May,
2022. (*Corresponding author)
[Paper]
Illustration of the training and inference phases of DeepSDF and our PoseSDF.
Visualization of both shape reconstruction (DeepSDF v.s. PoseSDF) and pose estimation (V2V v.s. PoseSDF) results by directly taking real partial point cloud as input.
[23]
Yao Guo, Weidong Chen, Jie Zhao, and Guang-Zhong Yang*, "Medical Robotics: Opportunities in China",
Annual Review of Control, Robotics, and Autonomous Systems (ARCRAS), vol. 5, no. 1, pp. 361-383, May,
2022.
[Paper]

Taxonomy of medical robotics.

(a) Market sizes of medical robotics in the world and in China from 2017 to 2021. (b) Market distribution of different medical robots in China in 2019.
[22]
Yao Guo, Jianxin Yang, Yuxuan Liu, Xun Chen*, and Guang-Zhong Yang*, "Detection and Assessment of Parkinson's Disease based on Gait Analysis: A Survey",
Frontiers in Aging Neuroscience, 14:916971,
2022,
[Paper].
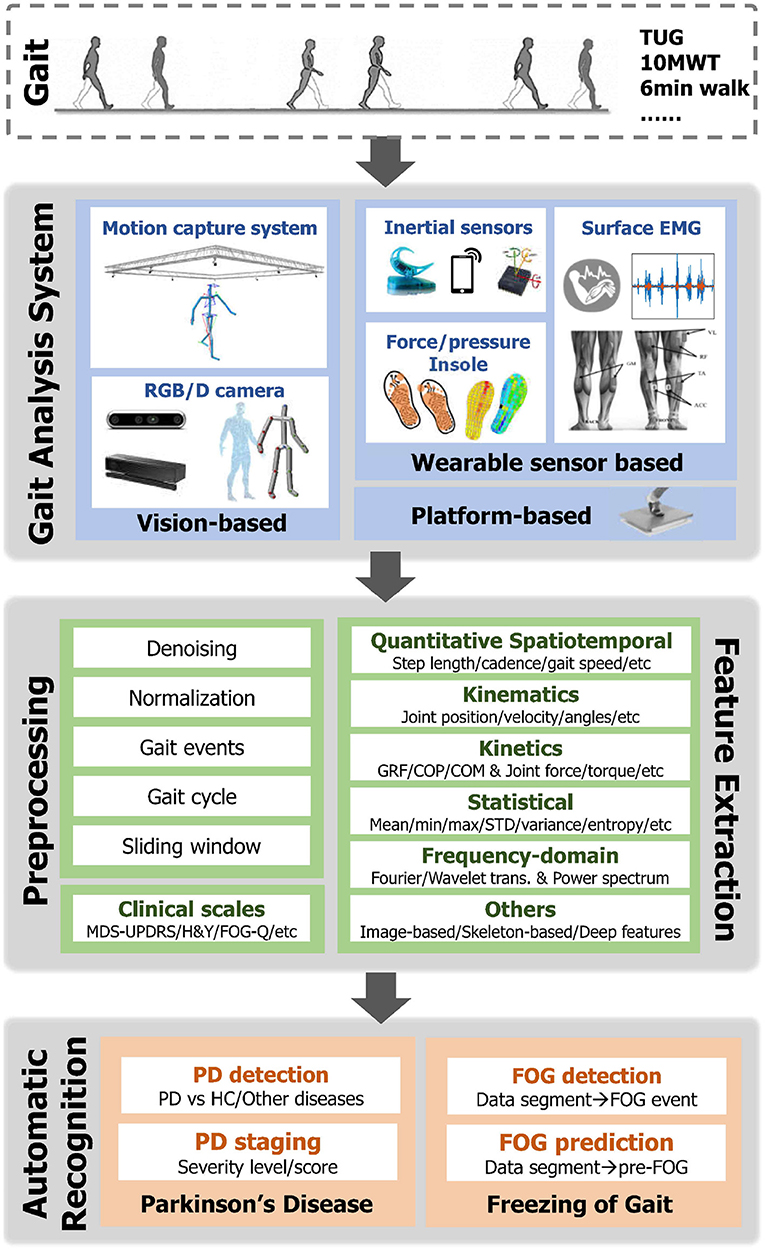
Illustration of the pipeline for automatic recognition in PD based on Gait Data.
[21]
Yao Guo, Daniel Freer, Fani Deligianni, and Guang-Zhong Yang*, "Eye-tracking for Performance Evaluation and Workload Estimation in Space Telerobotic Training",
IEEE Transactions on Human-Machine Systems (THMS), vol. 52, no. 1, pp. 1-11, February,
2022.
[Paper]
The left image demonstrates an overview of our O^3 simulator from a global view. The middle part shows the user interface observed by operators. The right part shows the controller and the control strategy.
Relationship between the simulator-defined Final score and three eye-tracking features extracted from trial data.
[20] Xiao Gu,
Yao Guo, Guang-Zhong Yang*, and Benny Lo*, "Cross-Domain Self-Supervised Complete Geometric Representation Learning for Real-Scanned Point Cloud Based Pathological Gait Analysis",
IEEE Journal of Biomedical and Health Informatics (J-BHI), vol. 26, no. 3, pp. 1034-1044, March,
2022.
[Paper]
Illustration of our proposed self-supervised learning framework.
Visualizations of completed point sets (bottom) from real-scanned data (top).
[19] Chengxi Zhong, Yuyu Jia, David C. Jeong,
Yao Guo*, Song Liu*, "AcousNet: A Deep Learning based Approach to Dynamic 3D Holographic Acoustic Field Generation from Phased Transducer Array",
IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 2, pp. 666-673, April,
2022.
[Paper] [Dataset]. (*Co-corresponding author)
Schematic of the holographic acoustic field generated from phased transducer array with squared transducer element.
[18] Zhihao Yuan†, Xu Yan†, Yinghong Liao,
Yao Guo, Guanbin Li, Zhen Li*, and Shuguang Cui , "X-Trans2Cap: Cross-Modal Knowledge Transfer using Transformer for 3D Dense Captioning",
IEEE/CVF Conference of Computer Vision and Pattern Recognition (CVPR), June,
2022, pp. 8563-8573.
[Paper]
2021
[17]
Yao Guo, Xiao Gu, and Guang-Zhong Yang*, "MCDCD: Multi-Source Unsupervised Domain Adaptation for Abnormal Human Gait Detection",
IEEE Journal of Biomedical and Health Informatics (J-BHI), vol. 25, no. 10, pp. 4017-4028, October,
2021.
[Paper]
An overview of the proposed MCDCD framework for abnormal gait recognition.
t-SNE visualization of the (a) Mocap & (b) EMG feature distributions befor and after unsupervised domain adaptation.
[16] Frank Po Wen Lo,
Yao Guo*, Yingnan Sun, Jianing Qiu, and Benny Ping Lai Lo, "Deep3DRanker: A Novel Framework for Learning to Rank 3D Models with Self-Attention in Robotic Vision",
IEEE International Conference on Robotics and Automation (ICRA), Xi'an, China, 30 May-05 June, pp. 4341-4347,
2021. (*Corresponding author)
[Paper]
Flowchart of the proposed Deep3DRanker.
The model architecture of the proposed Deep3DRanker.
[15] Xiao Gu,
Yao Guo, Fani Deligianni, Benny Lo, Guang-Zhong Yang*, “Cross-Subject and Cross-Modal Transfer for Generalized Abnormal Gait Pattern Recognition,”
IEEE Transactions on Neural Networks and Learning Systems (TNNLS), vol. 32, no. 2, pp. 546-560, February,
2021.
[Paper]
Illustration of the cross-subject and cross-modal transfer framework in abnormal gait recognition.
Illustration of cross-modal cross-subject transfer model.
[14]
Yao Guo, Xiao Gu, and Guang-Zhong Yang*, “Human–Robot Interaction for Rehabilitation Robotics.”
Digitalization in Healthcare: Implementing Innovation and Artificial Intelligence, Springer, pp. 269-295,
2021.
[Chapter]
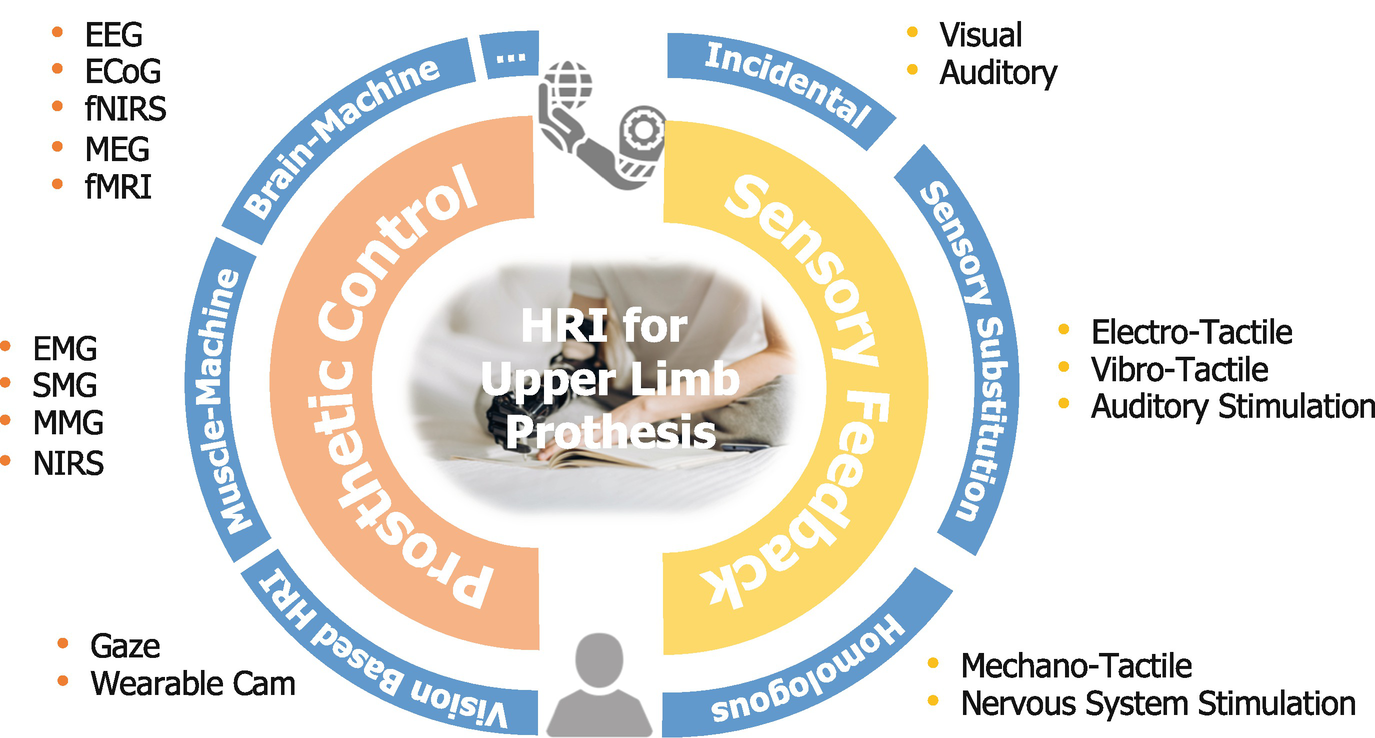
Bidirectional HRI in upper-limb prosthetic control, which includes forward prosthetic control and sensory feedback.
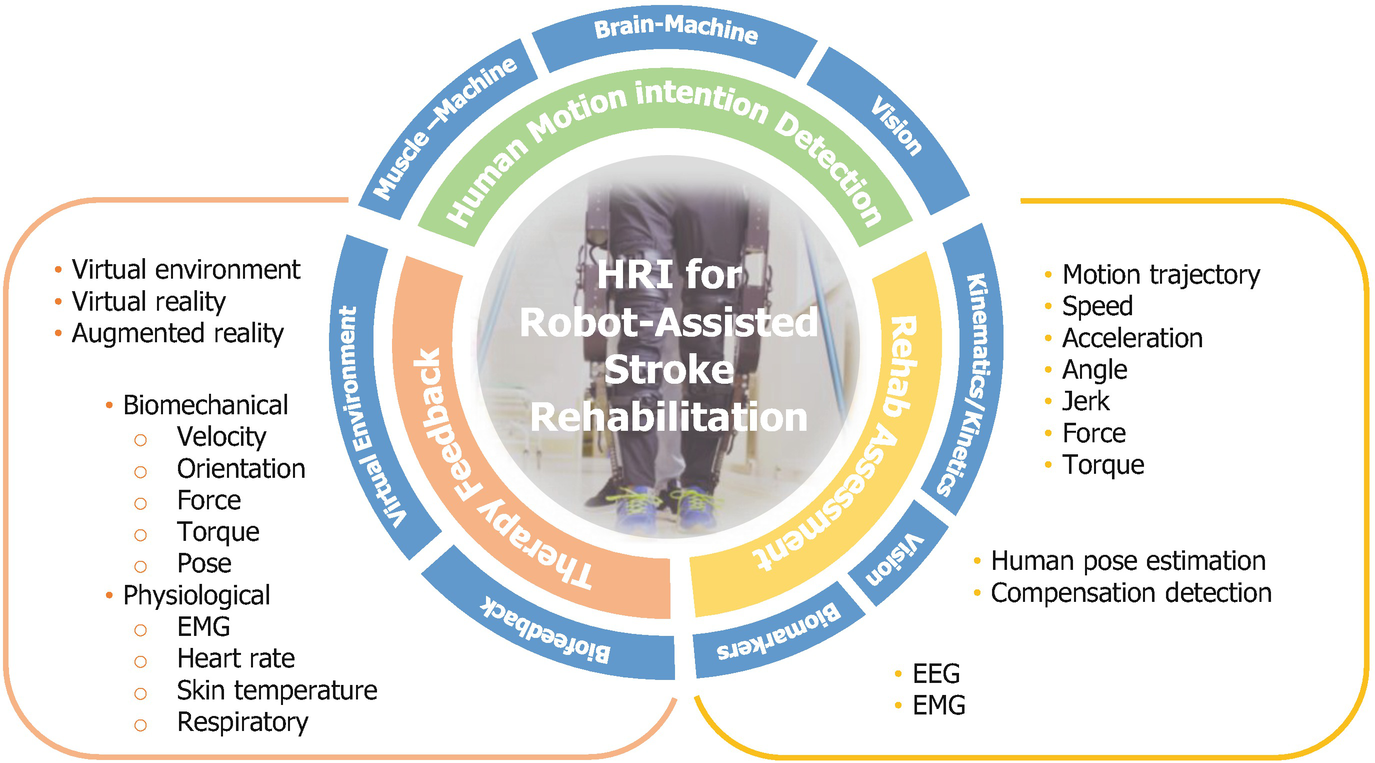
Requirements of HRI for active, natural, and intelligent robot-assisted stroke rehabilitation.
2020
[13] Xiao-Yun Zhou*,
Yao Guo, Mali Shen, Guang-Zhong Yang, “Application of Artificial Intelligence in surgery,”
Frontiers of Medicine, vol. 14, pp. 417-430, July,
2020.
[Paper]
[12] Xiao Gu,
Yao Guo, Fani Deligianni, Guang-Zhong Yang*, “Coupled real-synthetic domain adaptation for real-world deep depth enhancement,”
IEEE Transactions on Image Processing (TIP), vol. 29, pp. 6343-6356, April,
2020.
[Paper]
Overview of the proposed depth enhancement framework..
Qualitative results of cross-dataset performance on real-world data.
Before 2020
[11]
Yao Guo†, Fani Deligianni†, Guang-Zhong Yang*, “From Emotions to Mood Disorders: A Survey on Gait Analysis Methodology,”
IEEE Journal of Biomedical and Health Informatics (J-BHI), vol. 23, no. 6, pp. 2302-2316, November,
2019. (†: equal contribution),
[Paper]
Gait capture systems are mapped in a two-dimensional space from lab-based to home-based environment and from wearable to vision-based.
Demonstration of four discriminative gait parameters commonly used in emotion detection (neutral, happy, sad, anger and fear).
[10]
Yao Guo, Fani Deligianni, Xiao Gu, Guang-Zhong Yang*, “3D Canonical Pose Estimation and Abnormal Gait Recognition with a Single RGB-D Camera,”
IEEE Robotics and Automation Letters (RA-L) & IROS 2019, vol. 4, no. 4, pp. 3617-3624, October,
2019.
[Paper]
Overview of the proposed mobile 3D canonical gait analysis system.
Information fusion for human lower limb pose representation and 3D gait analysis in the canonical coordinate system.
[9] Ya-Yen Tsai,
Yao Guo, and Guang-Zhong Yang*, “Unsupervised Task Segmentation Approach for Bimanual Surgical Tasks using Spatiotemporal and Variance Properties,”
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, pp. 7940-7946,
2019.
[8] Dandan Zhang,
Yao Guo, Junhong Chen, Jindong Liu, and Guang-Zhong Yang*, ``A Handheld Master Controller for Robot-Assisted Microsurgery,''
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, pp. 394-400,
2019.
[7]
Yao Guo, You-Fu Li*, Zhanpeng Shao, “RRV: A spatiotemporal descriptor for rigid body motion recognition,”
IEEE Transactions on Cybernetics (TCyber), vol. 48, no. 5, pp. 1513-1525, May,
2018.
[Paper]
6-D representation of a rigid body motion trajectory.
[6]
Yao Guo, You-Fu Li*, Zhanpeng Shao, “DSRF: A Flexible Trajectory Descriptor for Articulated Human Action Recognition,”
Pattern Recognition, vol. 76, April, pp. 137-148, April,
2018.
[Paper]

Pipeline of the proposed skeletal representation.
[5]
Yao Guo, You-Fu Li*, Zhanpeng Shao, “On multi-scale self-similarities description for effective 3D/6D motion trajectory recognition,”
IEEE Transactions on Industrial Informatics (TII), vol. 13, no. 6, pp. 3017-3026, December,
2017.
[Paper]
[4]
Yao Guo, You-Fu Li*, and Zhanpeng Shao, “MSM-HOG: A flexible trajectory descriptor for rigid body motion recognition,”
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada, pp. 4298-4303,
2017.
[3]
Yao Guo, You-Fu Li*, and Zhanpeng Shao, “DSRF: A Flexible Descriptor for Effective Rigid Body Motion Trajectory Recognition,”
IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, pp. 1673-1678,
2016. (
Best Conference Paper Award)
[2]
Yao Guo, Kaide Huang, Nanyong Jiang, Xuemei Guo, Guoli Wang*, “An Exponential-Rayleigh model for RSS-based device-free localization and tracking,”
IEEE Transactions on Mobile Computing (TMC), vol. 14, no. 3, pp. 484-494, March,
2015.
[Paper]
[1]
Yao Guo, Kaide Huang, Nanyong Jiang, Xuemei Guo, and Guoli Wang*, “An Exponential-Rayleigh signal strength model for device-free localization and tracking with wireless networks,”
International Conference on Intelligent Control and Information Processing (ICICIP), Beijing, China,
2013, pp. 108-113.


