
3月25日,上海交通大学医疗机器人研究院康复实验室蓝宁教授团队应邀于Research发表观点性论文“Next-Generation Prosthetic Hand: from Biomimetic to Biorealistic”。
(DOI: 10.34133/2021/4675326)
神经假肢手是重建上肢截肢者手功能的辅具设备。为截肢者提供自如而灵巧的手功能控制是神经科学和康复工程半个多世纪以来契而不舍的追求和巨大挑战。人手的精细操作源于人体复杂的感知与运动神经控制系统。而目前肌电假肢手的功能性和灵巧性仍与人手相差甚远,主要是缺乏触觉和本体感觉,以及柔顺性驱动。本文提出了新观点,指出新一代神经假肢手的设计,需要从生物仿生的模仿转变为生物逼真的实现,通过修复人体感觉运动系统的生物真实构造和功能,重建假肢手与人体感觉运动系统的无缝融合,达到与神经系统信息与行为的类同性,从根本上改善假肢手的功能性和灵巧性。
论文由蓝宁教授作为首席科学家的国家重点研发计划“变革性技术关键科学问题”项目团队共同完成。文章介绍了团队正在开发的新一代假肢手变革性技术,包括:生物真实性的BMI(Brain-machine Interface,脑机接口)解码方法、高密度肌电(HD-EMG)真实运动意图识别,基于诱指感(Evoked Tactile Sensation)的无创触觉反馈、仿人纳米电子皮肤传感器、神经肌肉脊髓反射柔顺控制、以及超弹性连续体结构假肢手。
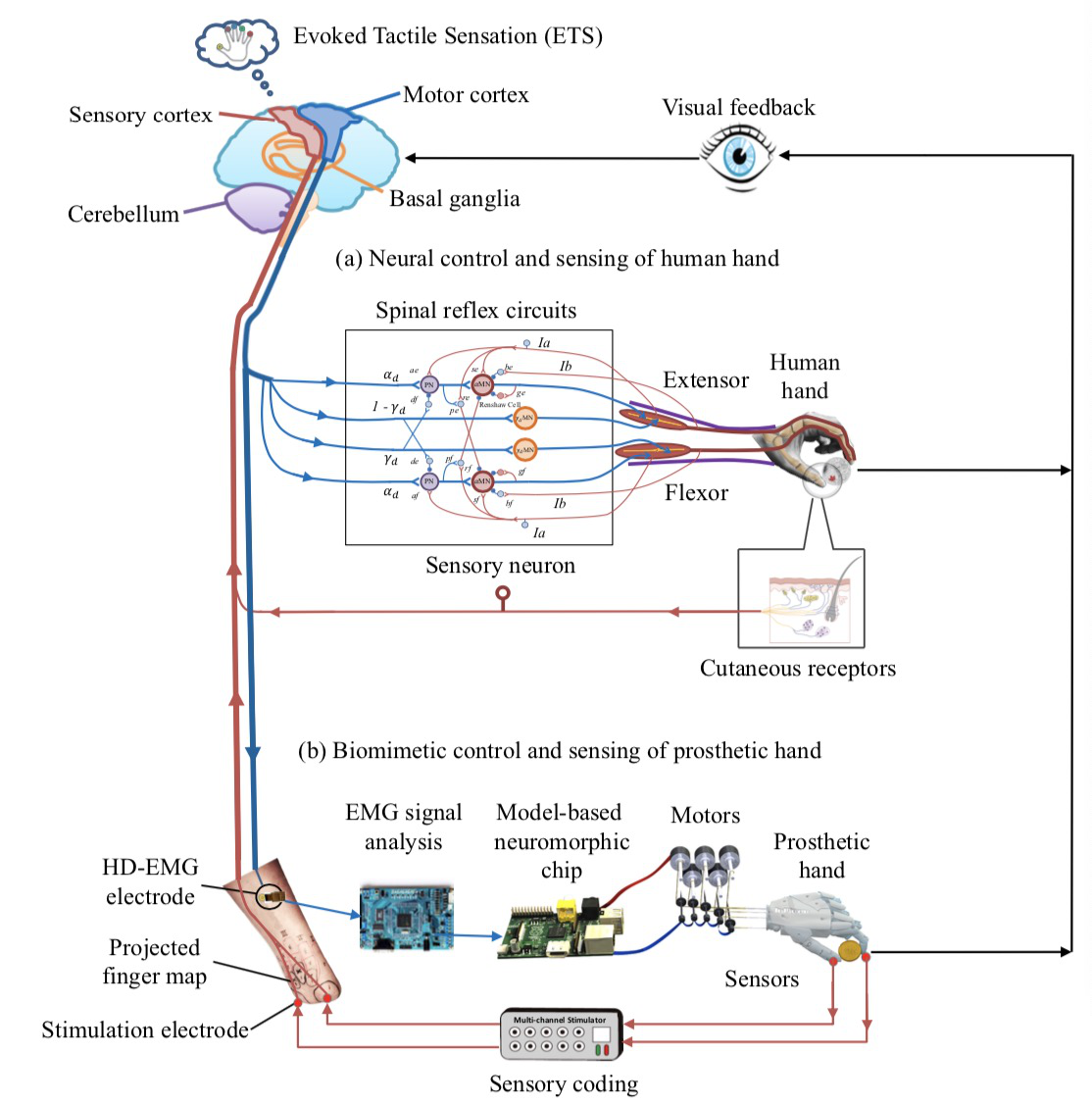
图:人手的感知运动控制系统和新一代生物真实假肢手
这些变革性技术的研发已取得阶段性进展。其中基于诱指感的无创触觉反馈技术和高密肌电真实运动意图识别技术已经进入人体临床试验,团队正在评估其对假肢手功能提升的作用和贡献。
原文链接:https://spj.sciencemag.org/journals/research/2021/4675326/
文字 | 郝蔓钊
排版 | 张悦
