
近日,上海交通大学医疗机器人研究院郑国焱教授团队于Medical Image Analysis杂志上在线发表论文“Spine-transformers:Vertebra labeling and segmentation in arbitrary field-of-view spine CTs via 3D transformers”
(DOI:10.1016/j.media.2021.102258)
图源:Medical Image Analysis
研究团队提出的任意视野脊柱CT扫描中全自动标记和分割3D椎骨的新方法解决了在脊柱疾病的智能诊疗和机器人辅助脊柱手术等应用中的难题,具有广阔的应用转化前景。
该文章受国家自然科学基金重点项目资助。
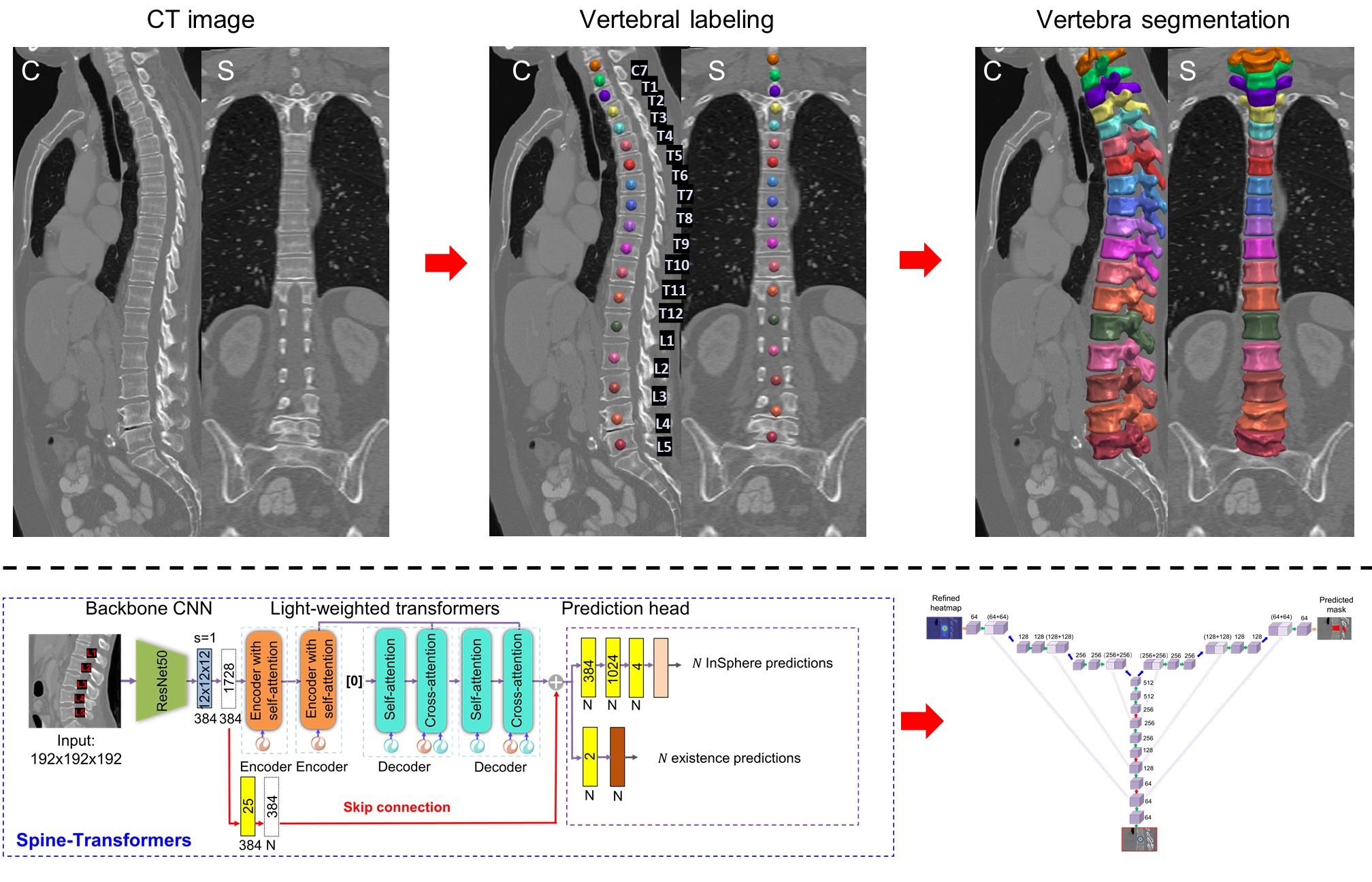
上图:从任意视野脊柱CT扫描中进行全自动椎骨标记和分割
下图:郑国焱教授团队提出的新型神经网络架构 Spine-Transformers
原文链接:https://www.sciencedirect.com/science/article/pii/S1361841521003030
作者 | 郑国焱
翻译 | 张悦
责编 | 陈卫东
