
杨广中教授、冯原教授团队发表文章“一种用于实时磁共振引导脑组织介入的深度展开神经网络”
医疗机器人研究院杨广中、冯原团队提出基于LSFP-Net的实时磁共振成像方法并发表在近期的Nature Communications 杂志上。该方法可对远程驱动的脑组织介入进行实时监控,并可集成到现有诊断用3T磁共振成像系统中,应用于实时磁共振引导下的机器人辅助神经外科手术中。论文第一作者是生医工学院博士生何钊,杨广中,冯原教授和瑞金医院神经外科孙清芳主任医师为共同通讯作者。
Zhao He, Ya-Nan Zhu, Yu Chen, Yi Chen, Yuchen He, Yuhao Sun, Tao Wang, Chengcheng Zhang, Bomin Sun, Fuhua Yan, Xiaoqun Zhang, Qing-Fang Sun*, Guang-Zhong Yang*, Yuan Feng*. “A deep unrolled neural network for real-time MRI-guided brain intervention”. Nature Communications, 2023, doi: 10.1038/s41467-023-43966-w.
实时引导和可视化是机器人辅助手术的关键,尤其是在脑组织活检、消融以及脑深部电刺激(DBS)等神经外科手术中,准确定位靶点和精准介入至关重要。计算机断层扫描成像(CT),超声成像以及磁共振成像(MRI)已被应用于机器人辅助的神经外科手术中。但由于CT 有电离辐射,超声成像不能提供足够的空间分辨率和脑组织对比度,而磁共振成像(MRI)无电离辐射,具有良好的软组织对比度,是引导神经外科手术的理想成像模态。但其相对较慢的成像速度为其临床应用带来了巨大障碍。
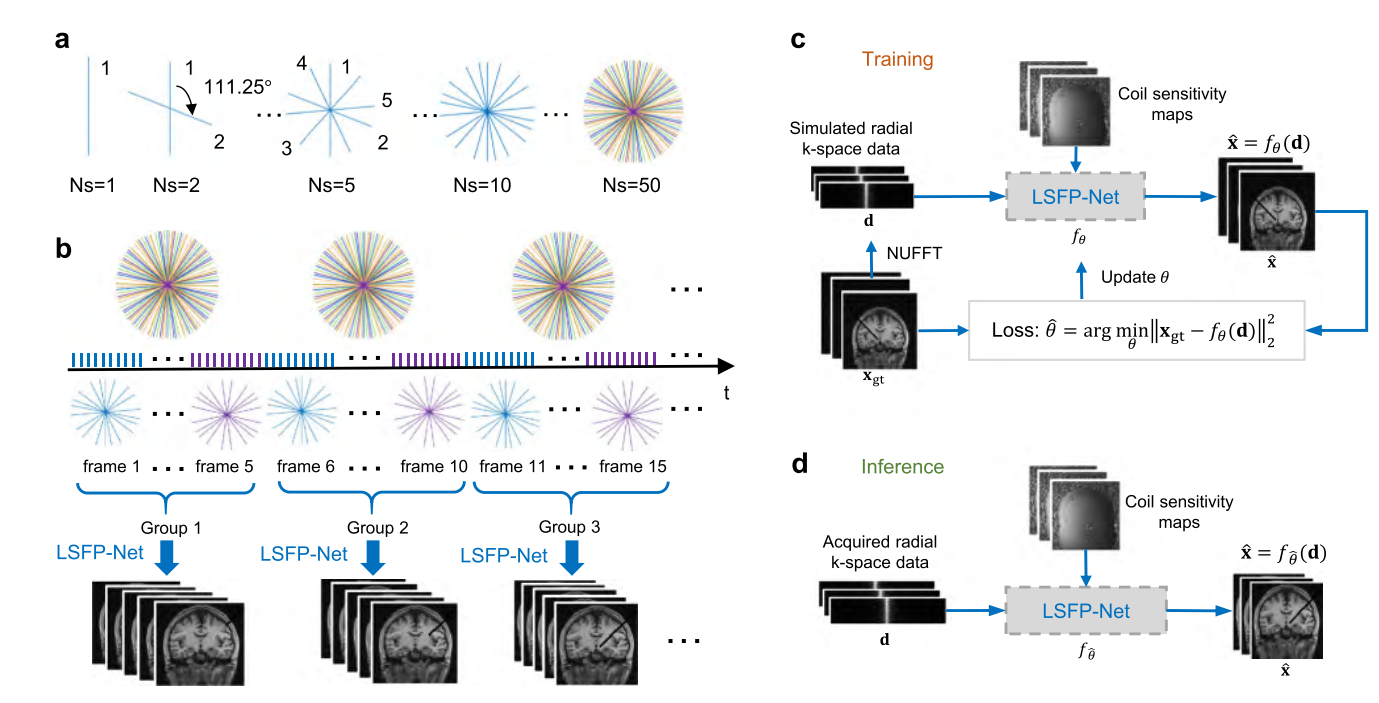
图1 基于LSFP-Net的实时磁共振介入图像重建
在这项研究中,作者将一种基于低秩和稀疏分解的磁共振介入图像重建迭代算法(LSFP)展开到神经网络中,提出了一种用于实时磁共振介入图像重建的深度神经网络(LSFP-Net)。相比与其他同类方法,LSFP-Net充分利用了图像背景的低秩特性和介入特征的稀疏特性,并对低秩分量和稀疏分量分别进行稀疏变换后进行了一范数约束,利用了更多的图像先验信息,从而实现了更高的加速倍数。且相比于传统的迭代算法,LSFP-Net中的正则化参数和稀疏变换可以在训练时进行学习,具有更好的实用性以及更快的重建速度。

图2 实时磁共振引导下的水果胶体和动物脑组织样本介入实验
LSFP-Net的输入为k空间数据,采样方式为黄金角径向采样,即相邻采样辐条之间的角度为黄金角(111.25°)。相比与传统的笛卡尔采样而言,径向采样方式对运动不敏感,更适用于介入成像。介入图像以组为单位进行重建,即将采集的一组k空间辐条分为几个部分,用于重建多帧图像,不同于传统低秩稀疏分解算法的回顾性重建,该方法可以实现采集和重建的同步进行。
进一步地,作者将采用仿真数据训练好的LSFP-Net模型部署到联影3T磁共振成像系统中,并自主设计制作了一个可远程驱动的介入装置,搭建了一个实时磁共振介入成像系统。该系统可实现在远程介入的同时,实时进行磁共振的扫描和重建,监控介入过程。最后,通过水果胶体、动物脑组织样本、以及人体标本介入实验对系统的功能进行测试,并评估系统的性能。实验结果表明,基于LSFP-Net搭建的实时磁共振介入成像系统可实现2D/3D实时成像,平面内空间分辨率为1×1 平方毫米,时间分辨率为80/732.8 毫秒,包括数据通信、处理和重建时间在内的延时为 0.4/3.66 秒。
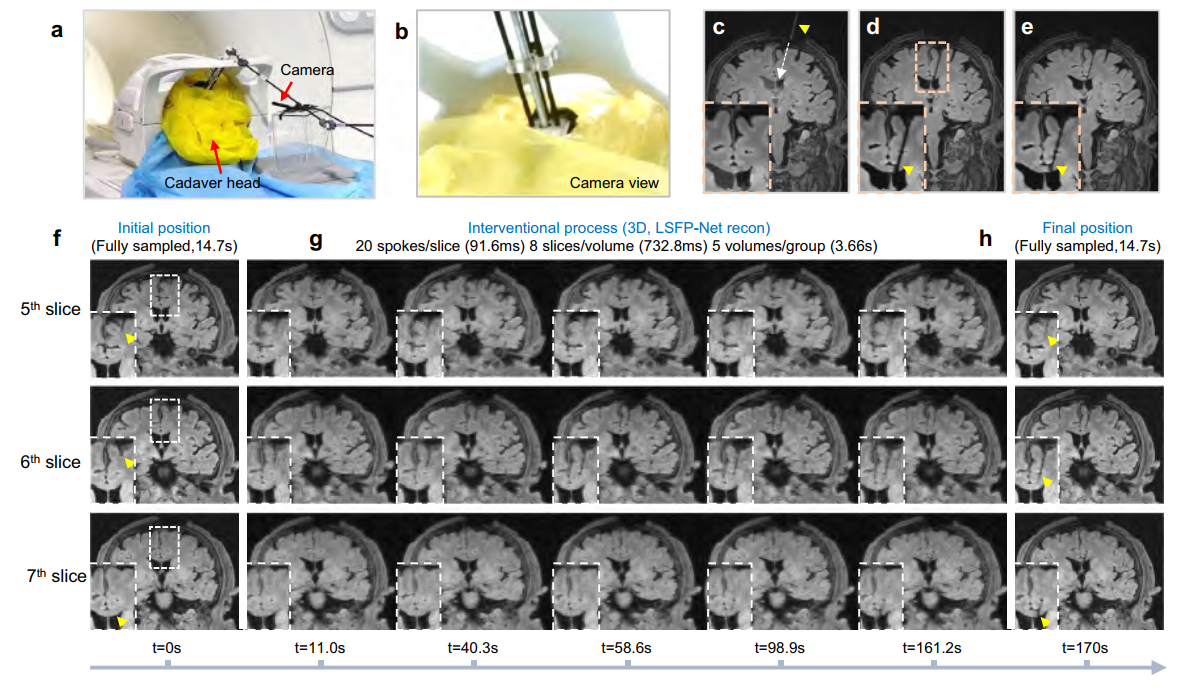
图3 实时磁共振引导下的人体标本介入实验
综上,本文所提出的基于LSFP-Net的实时磁共振成像方法可对远程驱动的脑组织介入进行实时监控,并可集成到现有诊断用3T磁共振成像系统中,具有应用于实时磁共振引导下的机器人辅助神经外科手术中的潜力。
